
Guida all’Assemblaggio di un drone quadcopter con Pixhawk 2.4.8
Costruire un drone non è solo un’attività per gli appassionati di tecnologia, ma anche un’esperienza pratica che ti permette di comprendere a fondo il funzionamento di questi dispositivi. Se stai pensando di assemblare un drone da zero, sei nel posto giusto. In questo articolo, cercherò di descrivere quanto necessari per la costruzione di un drone ed elencherò e descriverò i componenti essenziali necessari per permetterti di assemblare un UAS (Unmanned Aerial System) . Inoltre, condividerò la mia esperienza diretta nella costruzione del drone mio F450 EFLY04, evidenziando le sfide incontrate e le soluzioni adottate. Preparati a entrare nel dettaglio tecnico dei droni e a scoprire come ho assemblato il mio F450 EFLY04.
Cosa serve per costruire un drone quad?
La costruzione di un drone quadricottero, comunemente noto come “quad”, richiede una comprensione chiara dei componenti essenziali e del loro funzionamento. Ogni pezzo ha un ruolo specifico nell’assicurare che il drone voli in modo stabile e sicuro. Che tu sia un principiante che si avvicina per la prima volta al mondo dei droni o un esperto in cerca di una “riassunto”, questa guida ti fornirà una panoramica dettagliata dei componenti chiave necessari per assemblare un drone quadricottero funzionante. Dalle strutture di base come il telaio ai sistemi avanzati come la telemetria, esploreremo ogni elemento in dettaglio. Prosegui nella lettura per scoprire tutto ciò che serve per costruire un drone quad.
|
TELAIO
|
Il telaio, spesso chiamato “frame”, rappresenta la colonna vertebrale di qualsiasi drone. È la struttura principale su cui vengono montati tutti gli altri componenti, come l’avionica, le batterie e i motori. I telai possono essere realizzati in vari materiali, tra cui alluminio, fibra di carbonio o ABS, a seconda delle esigenze di peso, resistenza e costo.
Un aspetto cruciale nella scelta del telaio è la sua dimensione, spesso indicata da termini come F450, F250, F650, ecc. Questa terminologia si riferisce alla distanza diagonale tra i motori del drone, misurata in millimetri. Ad esempio:
|
|
MOTORI
|
I motori rappresentano il cuore pulsante di qualsiasi drone, trasformando l’energia elettrica in movimento meccanico e fornendo la spinta necessaria per il decollo, il volo e le manovre. La scelta del motore giusto è fondamentale per garantire prestazioni ottimali e sicurezza.
|
|
ELICHE
|
Le eliche sono componenti fondamentali di un drone, responsabili della generazione di spinta e, di conseguenza, del decollo, del volo e delle manovre del drone. Sono progettate per convertire l’energia rotazionale del motore in spinta aerodinamica. La scelta e l’installazione corretta delle eliche sono cruciali per il funzionamento ottimale del drone.
|
|
ESC
|
L’ESC, o Electronic Speed Controller, è un dispositivo fondamentale nel sistema di propulsione di un drone. Esso agisce come un ponte tra la batteria e i motori, controllando e regolando la potenza fornita ai motori.
|
|
CENTRALINA
|
La Centralina, spesso denominata Flight Controller (FC) o Autopilota, è il cervello del drone. Gestisce e coordina tutte le operazioni di volo, assicurando che il drone mantenga la stabilità, risponda ai comandi e operi in modo sicuro in varie condizioni.
|
|
IMU
|
L’IMU, o Inertial Measurement Unit, è un dispositivo elettronico critico utilizzato nei droni per monitorare e riportare la velocità, l’orientamento e la forza gravitazionale. Funziona come gli occhi e le orecchie del drone, fornendo dati essenziali al Flight Controller (Centralina) per mantenere il volo stabile e controllato.
|
| GPS E MAGNETOMETRO
|
Il GPS e il Magnetometro sono componenti essenziali per la navigazione e l’orientamento di un drone. Mentre entrambi sono cruciali per determinare la posizione e la direzione del drone, hanno funzioni distinte e complementari.
|
|
PMB
|
La PMB, conosciuta anche come Power Distribution Board (PDB), è un componente essenziale nella costruzione di un drone. Funziona come un hub centrale per la distribuzione di energia elettrica ai vari componenti del drone, garantendo che ogni parte riceva la potenza necessaria per funzionare correttamente.
|
| DATALINK/TELEMETRIA
|
Il Datalink e la Telemetria sono sistemi di comunicazione fondamentali per un drone, permettendo la trasmissione di dati tra il drone e un dispositivo a terra, come un radiocomando, un computer o uno smartphone.
|
|
RICEVENTE
|
La Ricevente è un componente elettronico fondamentale di un drone, che funge da ponte tra il radiocomando (o trasmettitore) e il sistema di volo del drone. È attraverso la Ricevente che i comandi inviati dal pilota vengono ricevuti e tradotti in azioni specifiche sul drone.
|
|
BATTERIA
|
La batteria è la fonte di alimentazione principale di un drone, fornendo l’energia necessaria per far funzionare i motori, i sistemi elettronici e altri componenti. La scelta della giusta batteria è cruciale per garantire prestazioni ottimali e sicurezza durante il volo.
|
|
PAYLOAD
|
Il termine “Payload” si riferisce al carico utile che un drone può trasportare e utilizzare durante il volo, al di là dei componenti essenziali per il volo stesso. Questo carico può variare da semplici fotocamere a sofisticati sensori scientifici, e la sua natura e peso influenzano direttamente le prestazioni e le capacità del drone.
|
|
PPM Encoder |
|
|
Buzzer
|
Un buzzer è un dispositivo elettronico che produce un segnale acustico. Utilizzato per fornire notifiche sonore o allarmi in vari dispositivi. In contesti legati ai droni è utilizzato come allarme di perdita del segnale o di batteria scarica. |
| Interruttore di sicurezza
|
Un interruttore che garantisce la sicurezza interrompendo l’alimentazione o il segnale in situazioni di emergenza o quando il drone non è in uso. Previene avviamenti accidentali e garantisce che il drone rimanga spento o in una modalità sicura quando non è in volo. |
|
Modulo OLED o Mini Osd (On Screen Dispaly)
|
Un piccolo display che mostra informazioni in tempo reale sullo stato del drone, come l’altitudine, la velocità, la direzione e la durata della batteria. Fornisce al pilota informazioni cruciali durante il volo, permettendogli di monitorare le condizioni del drone e di prendere decisioni informate. |
|
SD |
Una scheda di memoria utilizzata per archiviare dati, come video e foto catturati dal drone. Consente la registrazione di video e foto durante il volo, permettendo poi di trasferire i file su altri dispositivi per la visualizzazione o l’editing. |
|
Modulo Alimentazione
|
Il modulo di alimentazione è un dispositivo essenziale per fornire energia pulita al tuo FC da una batteria LiPo. Questo modulo non solo fornisce energia, ma offre anche misurazioni precise della tensione e della corrente della batteria. Queste misurazioni sono trasmesse al controllore di volo attraverso un cavo a 6 posizioni, permettendo di monitorare lo stato della batteria e di calcolare la carica residua, nonché di stimare il tempo di volo rimanente.
|
|
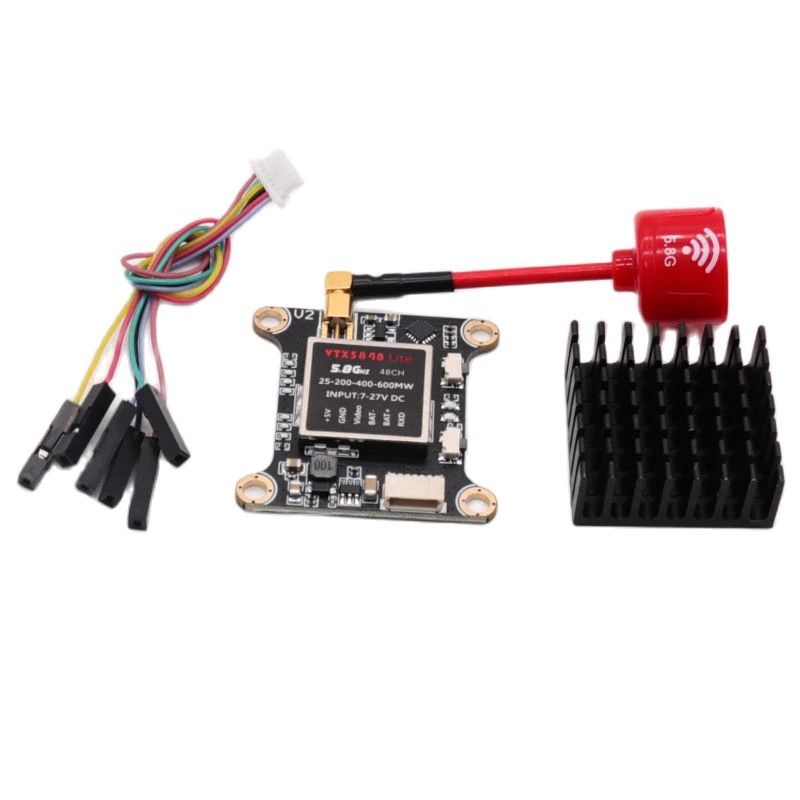
Trasmettitore video
|
Un esempio è il VTX5848, che supporta potenze da 25MW a 600MW e offre 48 canali. È essenziale per chi desidera utilizzare il drone per riprese video o volo in FPV (First Person View). |
|
Camera |
Camera per chi desidera effettuare volo in FPV ( Fisrt Person View ) |








Costruzione del mio Drone F450: EFLY04
Di seguito vi darò il dettaglio della lista delle componenti che ho comprato per la realizzazione del mio drone
Durante la fase di costruzione del mio drone F450, chiamato EFLY04, ho dedicato particolare attenzione alla selezione della centralina. Il mio obiettivo non era solo avere un Flight Controller (FC) potente, ma anche integrare un sistema di controllo esterno basato su Raspberry Pi. Questa integrazione mi permetterà di utilizzare algoritmi di intelligenza artificiale per analizzare i dati raccolti e implementare funzionalità avanzate. La centralina, in questo contesto, diventa fondamentale, agendo come il cuore del sistema, coordinando sia le operazioni di volo che le funzioni più complesse legate all’IA.
Perché Pixhawk 2.4.8?:
- La Pixhawk 2.4.8 è riconosciuta come una delle piattaforme di controllo di volo più avanzate attualmente disponibili sul mercato. La sua architettura e le sue funzionalità la rendono adatta sia per gli appassionati che per gli utilizzatori professionali.
- Questa centralina supporta l’ultimo firmware ufficiale Ardupilot, una suite open-source di alta qualità per il controllo di volo. Inoltre, è compatibile con il firmware PX4, un altro sistema operativo robusto e versatile per droni.
- Grazie alla sua capacità di supportare vari firmware e alla sua ampia gamma di funzionalità, la Pixhawk 2.4.8 offre una flessibilità ineguagliabile. Ciò permette agli utenti di personalizzare e configurare il drone in base alle proprie esigenze, sia che si tratti di volo ricreativo, fotografia aerea o applicazioni più tecniche.
- Essendo una delle piattaforme più popolari, la Pixhawk 2.4.8 gode di una vasta comunità di utenti e sviluppatori. Questo garantisce un costante aggiornamento, una ricca documentazione e un ampio supporto per risolvere eventuali problemi o dubbi
Caratteristiche Principali del Pixhawk 2.4.8:
- Processore avanzato 32-bit ARM CortexM4 con 2MB di flash, in grado di gestire il sistema operativo in tempo reale NuttX RTOS.
- 14 uscite PWM/servo per una vasta gamma di applicazioni.
- Interfacce multiple come UART, I2C, SPI e CAN per una connettività estesa.
- Sistema di backup integrato per garantire la sicurezza in caso di guasti.
- Modalità di volo sia automatiche che manuali per adattarsi a diverse esigenze.
- Sistema di alimentazione ridondante con failover.
- Luci LED multicolori per segnalazioni visive.
- Interfaccia buzzer multi-tono per segnalazioni acustiche.
- Capacità di registrazione dei dati di volo su Micro SD per analisi post-volo.
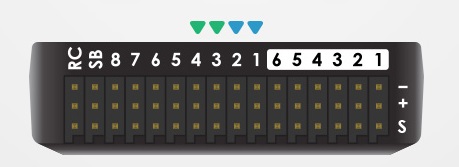
Specifiche dell’Interfaccia:
- 5 porte UART, con 2 di esse compatibili ad alta tensione e con controllo del flusso hardware.
- 2 porte CAN per una comunicazione estesa.
- Compatibilità con ricevitori satellitari Spektrum DSM/DSM2/DSM-X.
- Ingressi e uscite compatibili con Futaba SBUS.
- Ingresso segnale PPM per controlli avanzati.
- Ingresso RSSI (PWM o tensione) per monitorare la qualità del segnale.
- Porte I2C e SPI per ulteriori dispositivi.
- Ingressi VADC da 3.3V e 6.6V per sensori esterni.
- Interfaccia MICRO USB esterna per connessioni rapide al PC.

Il Telaio
Il telaio F450, realizzato in fibra di carbonio, è apprezzato per la sua combinazione di leggerezza e robustezza. Ci sono, naturalmente, altre opzioni di telaio sul mercato, ma questa si adatta perfettamente alle mie esigenze.

ESC (Electronic Speed Controller)
La qualità dell’ESC è vitale per assicurare un funzionamento ottimale e sicuro del drone. Inizialmente, ho optato per le BLHeli,
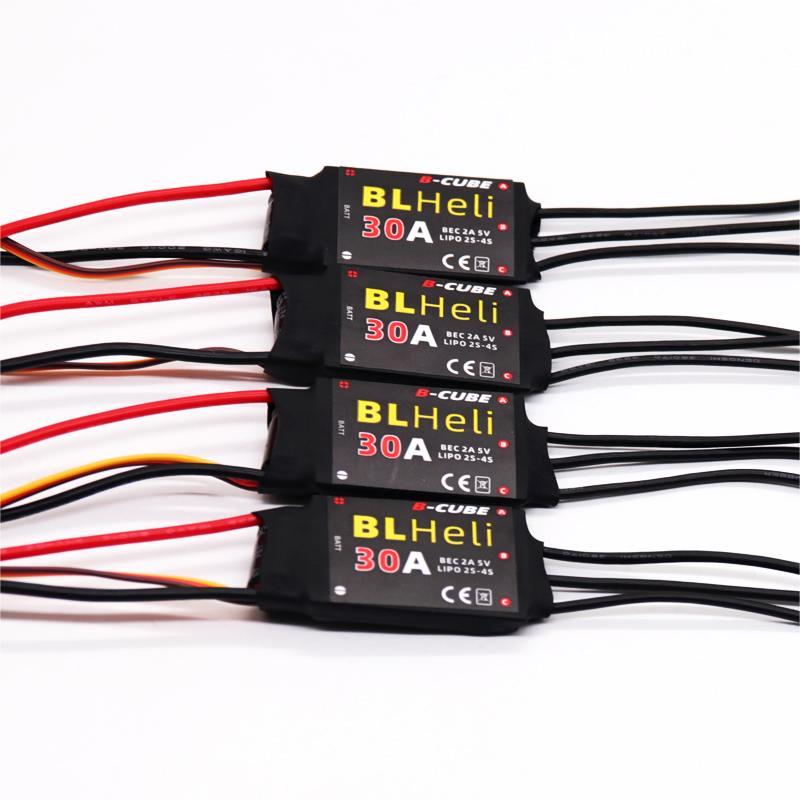
ma a causa di un montaggio errato dei motori – dove alcune viti erano troppo strette causando cortocircuiti o impedendo la rotazione – le esc si sono danneggiate. Di conseguenza, sono stato costretto a sostituirle con delle versioni ed alla fine ho optato per delle generiche da 30A.

Motori e Eliche
Motori 2212 1100KV

La scelta dei motori per un drone è cruciale, poiché influenzano direttamente le prestazioni, la stabilità e l’efficienza energetica del veicolo. Ho optato per i motori 2212 con una specifica di 1100KV. Ma cosa significa esattamente?
- Dimensione: Il numero “2212” si riferisce alle dimensioni del motore. Il primo numero, “22”, indica il diametro del motore in millimetri, mentre il secondo numero, “12”, rappresenta l’altezza. Questa dimensione è abbastanza comune per i droni di medie dimensioni e offre un buon equilibrio tra potenza e peso.
- KV: Il termine “KV” non si riferisce a kilovolt, ma piuttosto al numero di giri al minuto (RPM) che il motore farà per ogni volt senza carico. Un motore con una specifica di 1100KV girerà a 1100 RPM per volt. Questo significa che, se alimentato con una batteria da 11,1V, il motore girerà a circa 12.210 RPM (1100 x 11,1) senza carico. Un valore di KV più alto indica un motore ad alta velocità ma con meno coppia, mentre un valore di KV più basso indica un motore più lento ma con maggiore coppia.
Eliche da 1045

Le eliche sono fondamentali per generare la spinta necessaria al volo. La scelta delle eliche da “1045” in plastica autobloccanti è stata fatta tenendo conto delle specifiche dei motori.
- Dimensione e Materiale: Il numero “1045” indica le dimensioni e il passo dell’elica. “10” si riferisce al diametro dell’elica in pollici, mentre “45” indica il passo, ovvero la distanza teorica che l’elica si muoverebbe in un giro completo. Le eliche in plastica sono leggere e resistenti, ideali per la maggior parte delle applicazioni di droni.
- Autobloccanti: Questo tipo di eliche ha un meccanismo che le blocca in posizione sul motore, riducendo il rischio che si stacchino durante il volo.
Nella progettazione del mio drone, ho mirato a massimizzare la spinta, considerando attentamente la combinazione di eliche, motori e batteria. Ecco una disamina dettagliata delle mie scelte e delle relative implicazioni sulla spinta del drone:
Analisi della Spinta con Batteria 4S:
Batteria 4S: Questo tipo di batteria, come già spiegato in precedenza, è composto da 4 celle in serie, ciascuna con una tensione nominale di 3,7V. Questo porta la tensione totale a 14,8V.
Impatto sulla Spinta: Considerando il motore selezionato con una specifica di 1100KV, esso opererà a 1100 RPM per ogni volt fornito. Pertanto, con una batteria 4S che fornisce 14,8V, il motore raggiungerà una velocità di circa 16.280 RPM a vuoto. Questa combinazione, insieme alle eliche da 1045, è progettata per produrre una spinta notevole.
La combinazione di un motore 2212 1100KV, eliche da 1045 e una batteria 4S è stata scelta per garantire una spinta robusta e consistente. Questa spinta non solo garantirà un decollo agevole del drone, ma offrirà anche una potenza extra per manovre agili, accelerazioni e per trasportare eventuali carichi aggiuntivi.
Stima della Spinta: La determinazione precisa della spinta di un motore drone richiede test specifici e dati dettagliati sul motore stesso. Tuttavia, basandoci su informazioni generali per motori simili, possiamo fare una stima. Un motore 2212 1100KV, alimentato da una batteria 4S e abbinato a eliche da 1045, può produrre una spinta che oscilla tra 800g (0,8kg) e 1,2kg per motore, a seconda di variabili come l’efficienza del motore e la qualità delle eliche.
- Stima Conservativa:
- Spinta per singolo motore: 0,8kg
- Spinta totale per 4 motori: 3,2kg
- Stima Ottimistica:
- Spinta per singolo motore: 1,2kg
- Spinta totale per 4 motori: 4,8kg
Modulo di alimentazione

Il modulo di alimentazione APM è un dispositivo essenziale per fornire energia pulita al tuo FC da una batteria LiPo. Questo modulo non solo fornisce energia, ma offre anche misurazioni precise della tensione e della corrente della batteria. Queste misurazioni sono trasmesse al controllore di volo attraverso un cavo a 6 posizioni, permettendo di monitorare lo stato della batteria e di calcolare la carica residua, nonché di stimare il tempo di volo rimanente.
Caratteristiche Principali:
- Fonte di Alimentazione: Deriva energia da una batteria LiPo.
- Regolatore di Tensione: Il modulo ha un regolatore di commutazione on-board che fornisce un’uscita di 5.3 V con una corrente massima di 2.25A da una batteria LiPo fino a 4S.
- Connettori: Viene fornito con connettori Deans pre-assemblati e avvolto in una guaina termoretraibile per protezione.
- Funzione BEC: Il modulo ha una funzione BEC che può fornire 5.3V DC con una corrente continua massima di 3A. Questo assicura una fornitura di energia stabile alla scheda di controllo di volo.
- Connettore di Qualità: Utilizza connettori di segnale di alta qualità provenienti dal Giappone, garantendo una connessione affidabile tra la scheda di controllo di volo APM e il modulo di alimentazione.
- Utilizzo: Principalmente progettato per alimentare APM/Arduflyer, un ricevitore RC e accessori come GPS e radio telemetria. Non è destinato ad alimentare servi; per questo, si dovrebbe utilizzare l’ESC/BEC dell’aereo.
Specifiche Tecniche:
- Tipo di Spina: Deans e XR60
- Tensione Massima in Ingresso: 30 V
- Rilevamento Massimo della Corrente: 90A
- Configurazione di Tensione e Corrente: Configurato per 5V ADC
- Uscite del Regolatore di Commutazione: 5.3 V e 3A max
- Connettore: 6P cavo molex che si collega direttamente ad APM/Arduflyer 2.5 ‘PM’
- Colore: Nero e rosso
- Dimensioni: 137mm
- Lunghezza del Cavo: 192mm
- Peso: 27g
Telemetria Radio
Questi moduli consentono la comunicazione wireless tra il Pixhawk e altri dispositivi come computer o smartphone. Sono essenziali per monitorare in tempo reale le prestazioni del drone e per eventuali aggiustamenti. Il protocollo MAVLink (Micro Air Vehicle Link) è uno standard predominante utilizzato per la comunicazione tra i droni e le stazioni di terra o altri dispositivi. È un protocollo leggero e altamente affidabile, progettato per trasmettere informazioni come posizione GPS, altitudine, velocità e stato della batteria. Grazie a MAVLink, è possibile non solo ricevere dati telemetrici dal drone, ma anche inviare comandi per il controllo del volo, come cambi di direzione, variazioni di altitudine o l’attivazione di specifiche funzioni. La combinazione della telemetria radio con il protocollo MAVLink offre un controllo remoto avanzato e una minitoraggio dettagliato del drone in volo.
Nel mio caso ho acquistato un coppia ricevente/trasmittente: Radio 3DR 433Mhz 915Mhz 100MW/500MW/1000MW modulo di trasmissione dati Air Ground con OTG

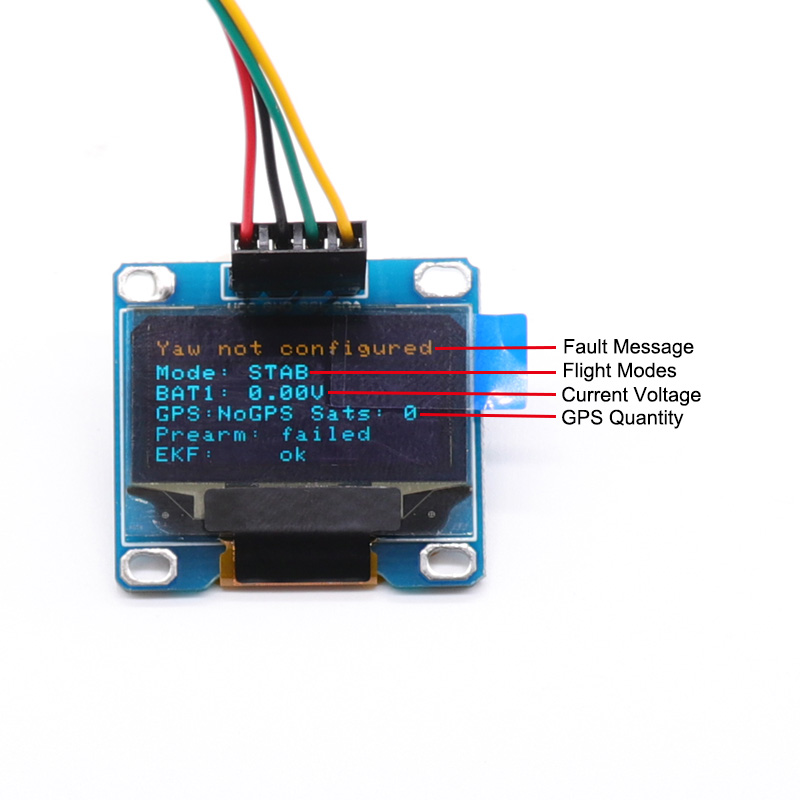
Modulo OLED o MINI OSD (On-Screen Display)
Questo dispositivo visualizza informazioni e messaggi in tempo reale, fornendo all’utente feedback immediato sullo stato del drone.
PDB (Power Distribution Board)
Il PDB distribuisce l’energia ai vari componenti del drone. Potete comprare quella che più si adatta alle vostre esigenze.

Procedura di Assemblaggio
- Preparazione delle Componenti:
- Organizza tutte le componenti: telaio, motori, ESCs, eliche, ricevente, trasmittente, Pixhawk, batteria, cavi, GPS, switch di sicurezza e altri accessori.
- Montaggio del Telaio:
- Inizia montando il telaio seguendo le istruzioni del produttore. Questo spesso implica l’installazione dei bracci e delle piastre centrali.
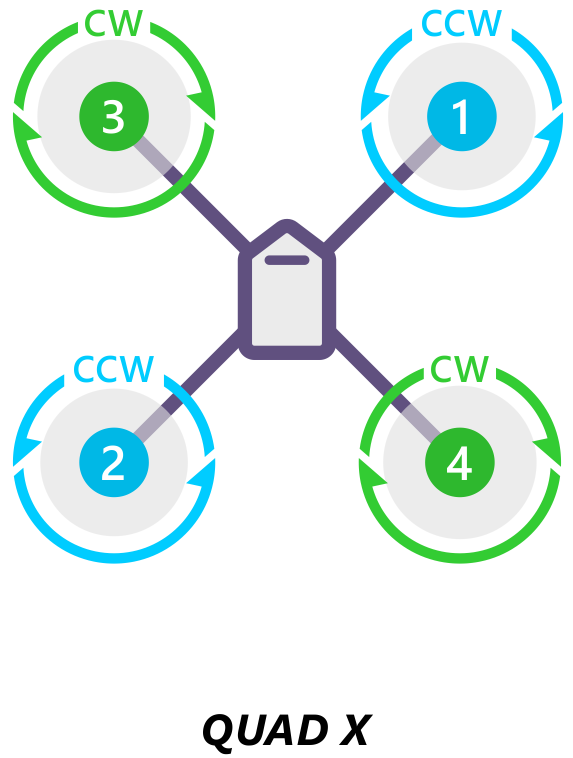
- Collegamento degli ESCs, Motori e Eliche:
- Collega ogni ESC al suo motore corrispondente.
- Monta i motori sui bracci del telaio usando le viti fornite.
- Installa le eliche tenendo conto della loro direzione (in senso orario o antiorario).

- Installazione del Pixhawk:
- Posiziona il Pixhawk sul centro del telaio utilizzando ammortizzatori per ridurre le vibrazioni.
- Collega gli ESCs al Pixhawk. Assicurati di rispettare l’ordine corretto dei motori come indicato nella documentazione.
- Collega la ricevente al Pixhawk. I canali CH1-CH4 della ricevente dovrebbero andare ai canali 1-4 del Pixhawk.
- Installazione del GPS:
- Monta l’antenna GPS su un supporto rialzato sul telaio per garantire la migliore ricezione possibile. Assicurati che sia lontano da altre componenti elettroniche per ridurre le interferenze.
- Collega il cavo del GPS al connettore GPS del Pixhawk.
- Installazione dello Switch di Sicurezza:
- Posiziona lo switch di sicurezza in un luogo facilmente accessibile sul telaio.
- Collega lo switch al connettore di sicurezza del Pixhawk.
- Altri Collegamenti:
- Se hai una telemetria o altri sensori (come un sensore di corrente o un sonar), collegali nei connettori appropriati del Pixhawk.
- Configurazione del Software:
- Collega il Pixhawk al tuo computer tramite un cavo USB.
- Utilizza una piattaforma come Ardupilot o PX4 per configurare il drone. Questo includerà la calibrazione dei sensori, l’impostazione dei modi di volo e la configurazione dei parametri di volo.
- Test Preliminari:
- Prima di volare, esegui un test a terra per assicurarti che tutti i componenti funzionino correttamente. Questo dovrebbe includere un test delle eliche, un controllo della direzione di rotazione dei motori e una verifica della risposta del drone ai comandi della trasmittente.
- Prime Prove di Volo:
- In un’area aperta e sicura, effettua brevi voli di prova, aumentando gradualmente l’altitudine e la distanza dal pilota.
- Consigli di Sicurezza:
- Non volare vicino a persone o strutture.
- Controlla sempre le condizioni del drone prima di ogni volo.
- Rispetta le normative locali e informa sempre le autorità competenti quando necessario.

Sono amante della tecnologia e delle tante sfumature del mondo IT, ho partecipato, sin dai primi anni di università ad importanti progetti in ambito Internet proseguendo, negli anni, allo startup, sviluppo e direzione di diverse aziende; Nei primi anni di carriera ho lavorato come consulente nel mondo dell’IT italiano, partecipando attivamente a progetti nazionali ed internazionali per realtà quali Ericsson, Telecom, Tin.it, Accenture, Tiscali, CNR. Dal 2010 mi occupo di startup mediante una delle mie società techintouch S.r.l che grazie alla collaborazione con la Digital Magics SpA, di cui sono Partner la Campania, mi occupo di supportare ed accelerare aziende del territorio .
Attualmente ricopro le cariche di :
– CTO MareGroup
– CTO Innoida
– Co-CEO in Techintouch s.r.l.
– Board member in StepFund GP SA
Manager ed imprenditore dal 2000 sono stato,
CEO e founder di Eclettica S.r.l. , Società specializzata in sviluppo software e System Integration
Partner per la Campania di Digital Magics S.p.A.
CTO e co-founder di Nexsoft S.p.A, società specializzata nella Consulenza di Servizi in ambito Informatico e sviluppo di soluzioni di System Integration, CTO della ITsys S.r.l. Società specializzata nella gestione di sistemi IT per la quale ho partecipato attivamente alla fase di startup.
Sognatore da sempre, curioso di novità ed alla ricerca di “nuovi mondi da esplorare“.
Comments
1 comments
![]()
claudio
interessante e ben dettagliato